Poppy Ergo Jr joue à Tic-Tac-Toe (vision par ordinateur)
Christophe Casseau, enseignant ISN, Lycée Camille Julian, BordeauxDurée
10 séances de 2h
Public
Terminale
Discipline(s)
ISN
Thématique(s)
Jeux
Notion(s)
Algorithmique, analyse d’image, perception-action
Description
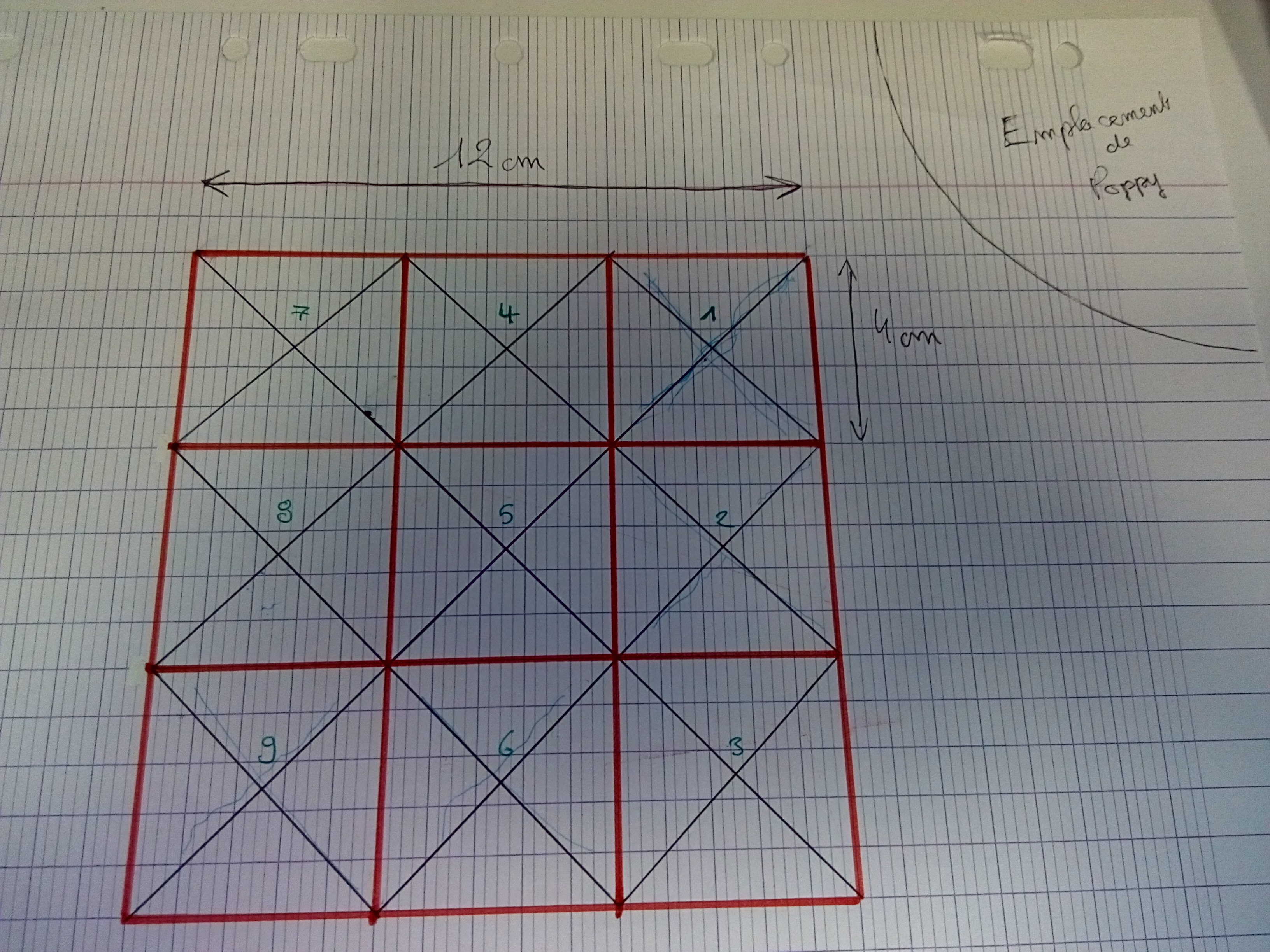
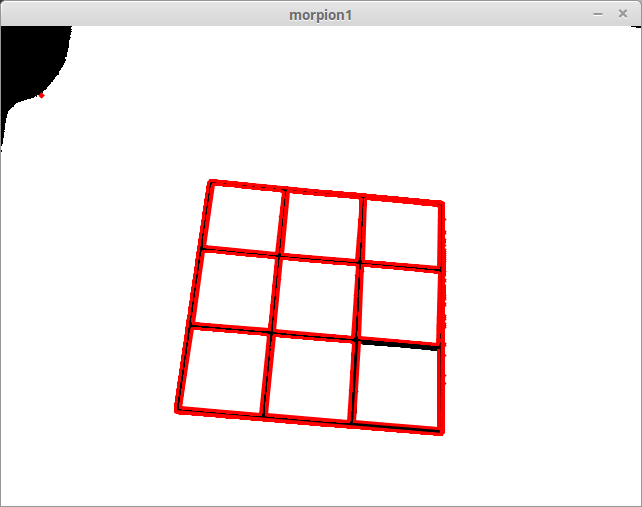
Faire jouer le robot Poppy Ergo Jr au Tic Tac Toe contre un humain en utilisant la vision par ordinateur.
Objectifs
- Introduction à la robotique :
- montage d’un système de développement robotique (action et vision) : Poppy + Raspberry + Snap! + webcam
- interaction du robot avec l’environnement
- Résolution et programmation d’un problème ouvert :
- implantation des fonctionnalités avec Snap! et Processing (proche de Java)
- communication inter-application (ou inter-langage) à l’aide d’un serveur web
- initiation à l’analyse d’image et à la vision par ordinateur
Pré-requis
- Partie déplacement du robot et tester les différentes positions acquises en Snap! : savoir contrôler le robot et faire bouger les moteurs ; utiliser les blocs (list, pick random et repeat ; récupérer la position des moteurs), créer un bloc (fonction), déclarer et affecter une variable.
Ces concepts sont abordés dans le livret pédagogique Ergo Jr et Snap! : parties 1, 3, 4, et 7.
- Partie traitements préliminaires de l’image : utiliser l’API de Processing, video et OpenCV.
Matériel nécessaire
Par groupe-projet :
- 1 Poppy Ergo Jr avec sa carte Raspberry
- Programmation en Snap! (déjà inclu dans le robot)
- Une webcam connectée à l’ordinateur
- Processing avec les modules OpenCV, net, video et Arrays
Ressources