
Le Poppy Torso augmenté de l’ENSAM, le retour.
Toujours sur la thématique THEMA du projet de l’an dernier, de nouveaux étudiants en Bachelor 2 de technologie de l’ENSAM (Talence) ont pu travailler sur le robot Poppy Torso, dont l’objectif cette fois-ci était de le doter d’une plateforme mobile.
Pour ce faire, les étudiants ont dû travailler en mode collaboratif pendant 6 semaines (mai – début juin) et réaliser une plateforme mobile pour que Poppy Torso puisse de déplacer sur un sol plan (gymnase, …). La phase de conception a abouti à 2 versions : une plateforme à 4 roues simples dont 2 motrices (servomoteurs Dynamixel), et une plateforme avec 4 roues mécanum motrices (servos Dynamixel). La première version est plutôt « low-cost » avec deux moteurs pas à pas qui n’aura finalement qu’une roue folle. Plus complexe que la version en deux roues motrices, la deuxième plateforme pourra se déplacer sur des terrains moins plats ou bien grimper sur des petits obstacle grâce à des suspensions.
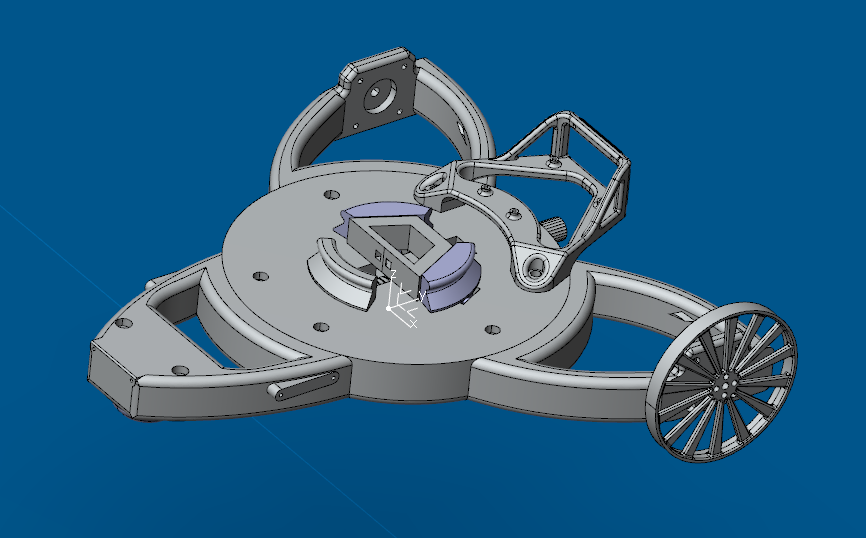
Version « low-cost » de la plateforme mobile
Le 13 Juin, jour de la démonstration.
Tout était prêt pour le jour J ! Un labyrinthe avait été mis au point dans le gymnase dans le but de le faire parcourir par les Poppy Torso, fraîchement dotés de petites roulettes. Mais c’était sans compter sur quelques problèmes de dernières minutes… Au final, seule la version « low-cost » fut présentée par les étudiants, la version 4 roues motrices était seulement en exposition. Pour palier à cette petite déception, les étudiants ont organisé en urgence un jeu de mime avec le robot : comme Freddie Mercury le chante si bien, the show must go on!
Voici un lien vers un storify qui raconte la présentation, qui au final, s’est très bien passée, ainsi qu’une petite vidéo pour vous le démontrer.
Et pour la suite ?
L’année prochaine, les mêmes étudiants vont continuer à travailler sur leur projet de plateforme mobile en troisième année. De quoi prendre un peu de recul sur ce qui a déjà été fait afin de mettre au point des plateformes mobiles plus performantes avec des fonctionnalités en plus !
Crédit : ENSAM Talence, Jean-Luc Charles
Rédigé par Kelian Schindowsky